Анотація. У статті розглянуто проблему оптимізації маршрутів безпілотних літальних апаратів (дронів) у логістичних ланцюгах. Проведено аналіз сучасних досліджень у цій сфері, який охоплює методи планування маршрутів дронів з урахуванням різних критеріїв – мінімізації часу доставки, енергоспоживання, подолання обмежень дальності та вантажопідйомності. Окрему увагу приділено класифікації методів оптимізації на точні, евристичні та метаевристичні, їхнім особливостям, перевагам і недолікам. Наведено порівняльну таблицю основних категорій методів та графік, що ілюструє ефективність цих методів за показниками часу та енерговитрат. Запропоновано математичну модель оптимального маршруту дрона на основі дискретних рівнянь оптимізації маршрутизації. Розглянуто реальні кейси впровадження дронів у логістиці (Amazon Prime Air, Zipline, Wing тощо), що демонструють практичні аспекти та результати застосування оптимізованих маршрутів. За результатами дослідження сформульовано висновки щодо ефективності різних підходів та окреслено перспективи подальших досліджень у напрямі вдосконалення логістичних доставок із використанням БПЛА.
Ключові слова: дрон; безпілотний літальний апарат; оптимізація маршруту; логістика; точні методи; евристичні алгоритми; метаевристичні алгоритми; математичне моделювання; доставка останньої милі.
АКТУАЛЬНІСТЬ ПРОБЛЕМИ. Активний розвиток технологій безпілотних літальних апаратів відкриває нові можливості для логістики, особливо на етапі «останньої милі» доставки. Оптимізація маршрутів дронів є надзвичайно актуальною, оскільки дозволяє підвищити швидкість виконання замовлень та знизити витрати на транспортування в порівнянні з традиційними методами доставки. Дрони здатні доправляти вантажі без затримок, минаючи затори, що особливо важливо в умовах густонаселених міських районів та віддалених місцевостей.
Водночас існують суттєві обмеження – обмежений радіус дії та час польоту через ємність батарей, невелика вантажопідйомність, залежність від погодних умов – які вимагають ретельного планування маршрутів. Тому постає потреба в ефективних алгоритмах оптимізації, які враховують специфіку дронів і забезпечують баланс між швидкістю доставки, енергоефективністю та безпекою. Зважаючи на ці фактори, дослідження оптимізації маршрутів дронів є своєчасним і важливим для підвищення ефективності сучасних логістичних систем.
АНАЛІЗ ОСТАННІХ ДОСЛІДЖЕНЬ І ПУБЛІКАЦІЙ. Задача побудови оптимальних маршрутів дронів привертає все більше уваги науковців, що обумовлено зростанням практичного застосування безпілотників у різних сферах доставки. Низка робіт присвячена розширенню дальності та масштабів роботи дронів за рахунок нетривіальних рішень. Зокрема, Чаудхурі та ін. запропонували підхід використання громадського транспорту для перевезення дронів на частині шляху: дрони можуть пересаджуватися на автобуси чи трамваї, економлячи заряд батареї та збільшуючи ефективний радіус дії. Алгоритмічно це реалізовано через дворівневу схему: на верхньому рівні розв’язується задача призначення дронам послідовностей доставок з мінімізацією максимального часу виконання будь-якого замовлення, а на нижньому – періодична маршрутизація флоту дронів з урахуванням розкладу громадського транспорту.
Такий підхід дозволив авторам досягти масштабованості рішення до сотень дронів і тисяч замовлень: модельна апробація показала можливість обслуговування до 5000 посилок 200 дронами із використанням до 8000 зупинок транспорту, причому час розрахунку рішень становив лічені секунди[8]. Це свідчить про значний потенціал комбінування дронів із наземним транспортом.
Іншим напрямом досліджень є спільне планування маршрутів для автотранспорту і дронів. Так звані моделі типу «truck-and-drone» передбачають, що безпілотник стартує з вантажівки, доставляє посилку і повертається до неї у визначеній точці маршруту. Тонг та ін. розробили оптимізаційну модель для такої системи та запропонували алгоритм на основі табу-пошуку зі змінною околицею (Variable Neighborhood Tabu Search) для пошуку рішення[1].
В Applied Sciences (2022) вони показали, що цей метаевристичний алгоритм дозволяє близько до оптимуму вирішити задачу оптимального розподілу замовлень між вантажівкою та дроном, мінімізуючи загальний час доставки, враховуючи обмеження ємності батареї дрона та необхідність очікування вантажівки в точках зустрічі. Подібні задачі часто моделюються як варіації відомої задачі комівояжера з дронами (TSP-D), де метою є мінімізація тривалості спільної місії вантажівки і дрона. Розробляються точні методи розв’язання для малих випадків (наприклад, методи декомпозиції і гілок та меж) та евристики для більших сценаріїв[14].
Важливим аспектом оптимізації маршрутів є врахування енергетичних обмежень дронів. Роботи Кабука та ін. (2021) детально досліджували характер енергоспоживання малого дрона та побудували моделі прогнозування витрат енергії, включно з теоретичною моделлю і моделлю на основі машинного навчання[7]. Результати підтвердили, що витрати батареї значно залежать від профілю польоту: під час активного виконання завдання (наприклад, зйомки чи перевезення вантажу) дрон споживає більше енергії, ніж при просто транзитному прольоті без навантаження. Тому при маршрутизації важливо враховувати, що навіть “холості” переміщення між точками витрачають ресурс батареї, а активна робота датчиків чи маневри – тим більше. Цей факт підтверджується й у дослідженнях Кирлика і Сіпахіоглу (2019), де було введено задачі маршрутизації з урахуванням витрат енергії на переміщення без виконання завдання (deadheading) і під час виконання завдання (моніторинг) – останні споживають більше через активацію сенсорів. Відповідно, оптимальні маршрути мають мінімізувати не лише відстань чи час, а й сумарні енерговитрати з урахуванням режимів польоту.
Окремо слід відзначити роботи, що враховують вплив погодних умов та рельєфу на маршрути дронів. Іто та співавт. (2022) запропонували методику планування маршрутів доставки з урахуванням вітрових навантажень і ваги вантажу. Ними розроблено декілька стратегій (DPFS-L – оптимізація лише за вагою, DPFS-W – лише за вітром, DPFS-LW – комбіновано, тощо) для коригування траєкторії польоту відповідно до напрямку вітру, аби максимізувати використання попутного вітру та мінімізувати зустрічний опір. У результаті було досягнуто скорочення часу польоту і економії енергії майже на 10% порівняно зі стандартними методами на основі генетичного алгоритму та імітації відпалу. Такі дослідження підкреслюють важливість динамічного врахування зовнішніх факторів (погода, вітер, дощ) при побудові маршрутів – інакше отримані оптимальні шляхи можуть виявитись неефективними або небезпечними за реальних умов.
У вирішенні задач оптимізації маршрутів дронів спостерігається активне застосування методів штучного інтелекту та метаевристичних алгоритмів. В огляді Hooshyar & Huang (2023) відзначено, що у період 2018–2022 рр. значна частка досліджень була присвячена саме метаевристикам для планування траєкторій БПЛА. Популярними підходами стали генетичні алгоритми, рій частинок, мурашині алгоритми, методи імітації відпалу тощо, які при правильному налаштуванні забезпечують якісні рішення без потреби у градієнтах цільової функції. Метаевристики привабливі простотою реалізації (на основі поведінки тварин чи еволюційних принципів) та здатністю уникати локальних екстремумів завдяки випадковості в пошуку. Наприклад, у роботі Guo та ін. (2023) запропоновано формування рою дронів для колективної доставки, де алгоритм координації дронів дозволив знизити сумарні енерговитрати на 17% шляхом оптимального просторового розподілу апаратів у групі.
В інших дослідженнях застосовано нейромережеві моделі для швидкого розрахунку маршруту в режимі реального часу – зокрема, для задачі моніторингу (Habibbayli, 2022) було використано нейро-нечітке моделювання траєкторії квадрокоптера, що скоротило час обчислення маршруту порівняно з класичними алгоритмами. Отже, сучасний стан досліджень характеризується поєднанням різних підходів: класичних алгоритмів оптимізації, метаевристичних стратегій та методів машинного навчання. Вони можуть комбінуватись для досягнення комплексного ефекту – як зазначає огляд Кучеренка та Вакалюк (2024), результати окремих алгоритмів інколи доцільно поєднувати задля розв’язання багатокритеріальних задач. Попри значні успіхи, досі існують відкриті питання: більшість моделей оптимізації маршрутів не враховують одночасно всі ключові фактори (динамічний попит, погоду, енергію, багатодронові конфлікти)[4], що залишає простір для подальших досліджень у напрямі створення більш універсальних і адаптивних алгоритмів.
МЕТА ДОСЛІДЖЕННЯ. Метою даної роботи є узагальнення та систематизація підходів до оптимізації маршрутів безпілотників у логістиці, а також формулювання математичної моделі оптимального маршруту дрона. Для досягнення цієї мети необхідно проаналізувати сучасні методи планування маршрутів (точні, евристичні, метаевристичні) та порівняти їх ефективність, включаючи часові показники та енергоємність рішень. Передбачається розробити узагальнену дискретну модель оптимізаційної задачі маршрутизації дрона, яка враховує характерні обмеження (радіус дії батареї, необхідність повернення на базу тощо). Крім того, важливо розглянути реальні приклади застосування дронів у логістичних операціях, щоб зіставити теоретичні результати з практичними досягненнями і виявити напрями, де подальша оптимізація є найбільш перспективною. Таким чином, робота поєднує огляд літератури, аналітичне порівняння методів та елементи прикладного моделювання для комплексного висвітлення проблематики оптимізації маршрутів БПЛА.
Методи оптимізації маршрутів дронів. Існуючі підходи до оптимізації маршрутів можна умовно поділити на три категорії: точні методи, евристичні методи та метаевристичні методи. Кожна з цих категорій має свої особливості і застосовність залежно від розміру задачі та вимог до точності рішення. Точні методи гарантують знаходження глобально оптимального маршруту шляхом повного або часткового перебору можливих варіантів, але зазвичай є обчислювально складними (час виконання зростає експоненційно зі збільшенням числа точок доставки). Евристичні та метаевристичні алгоритми не гарантують абсолютного оптимуму, проте здатні за прийнятний час знаходити близькі до оптимальних рішення навіть для великих задач.
Для порівняння підходів наведено Таблицю 1, яка узагальнює основні категорії методів оптимізації маршрутів дронів, приклади алгоритмів, а також їх переваги та недоліки.
Таблиця 1 Порівняння основних категорій методів оптимізації маршрутів дронів
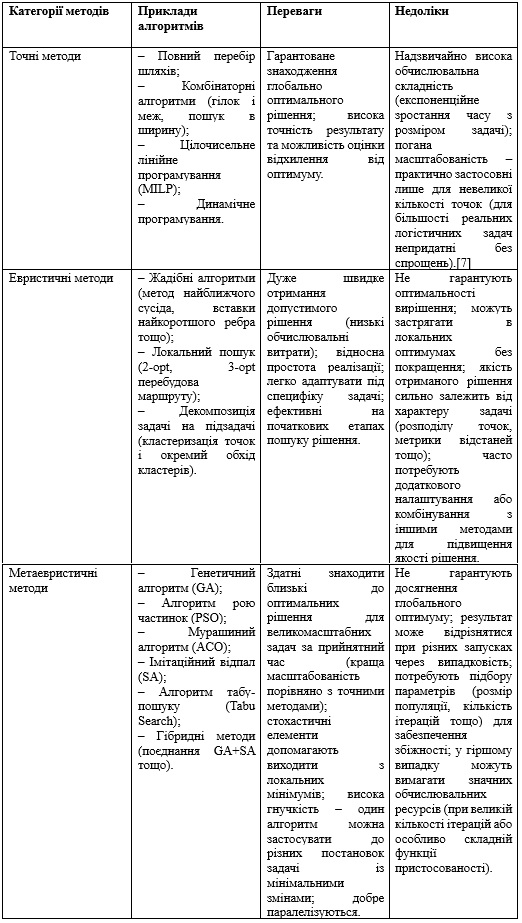
Як видно з Таблиці 1, вибір методу залежить від поставлених пріоритетів. Якщо критично отримати математично оптимальний результат і розмір задачі невеликий (десятки точок), можна застосувати точні методи. Наприклад, для 5–10 адрес можна розв’язати задачу комівояжера для дрона повним перебором або MILP-формулюванням і отримати абсолютно оптимальний маршрут. Проте для задач з сотнями адрес такий підхід не застосовується через вибухоподібне зростання кількості можливих маршрутів. В таких випадках на допомогу приходять евристики та метаевристики – вони дають розв’язок швидко, хоча й пожертвувавши гарантією оптимальності. На практиці часто комбінують кілька підходів: спочатку застосовують евристику для побудови початкового наближення, а потім покращують рішення метаевристичним алгоритмом (наприклад, ГА або табу-пошуком). Також варто зазначити, що методи штучного інтелекту, такі як глибоке навчання, починають інтегруватися в оптимізацію маршрутів. Нейромережі можуть швидко оцінювати найкращий напрямок руху на кожному кроці, проте їх треба навчити на великому обсязі даних маршрутів, і вони, як правило, не гарантують оптимум, а слугують частиною гібридної системи.
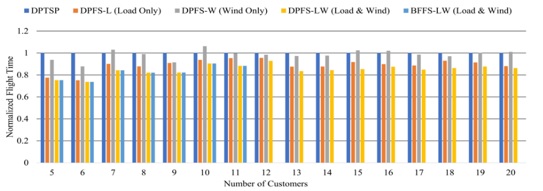
Для ілюстрації ефективності різних методів оптимізації розглянемо показник часу виконання доставки (або еквівалентно – тривалості маршруту) та порівняємо його для кількох типових алгоритмів. На Рисунку 1 наведено порівняння нормалізованого часу польоту дрона при використанні різних стратегій маршрутізації на тестових наборах даних. Графік побудовано за результатами моделювання (згідно з даними роботи Ito et al., 2022): по осі абсцис відкладено кількість точок доставки (клієнтів), а по осі ординат – середній час польоту, нормалізований відносно базового методу (DPFS-LW). Стовпчики різних кольорів відповідають алгоритмам: DPTSP (пошук рішень на основі класичної задачі комівояжера для дрона), DPFS-L (динамічне планування маршруту з урахуванням лише навантаження), DPFS-W (з урахуванням лише вітру), DPFS-LW (комплексне врахування навантаження і вітру) та BFFS-LW (покращений жадібний алгоритм з врахуванням обох факторів). Видно, що алгоритми, які враховують додаткові фактори (навантаження, вітер), забезпечують менший час польоту (стовпчики нижчі), ніж базовий підхід без таких врахувань[5].
Зі збільшенням кількості клієнтів різниця між методами стає більш помітною: метаевристичні та комбіновані алгоритми масштабуются краще і зберігають близький до оптимального час, тоді як спрощені методи демонструють зростання часу. Таким чином, використання вдосконалених методів оптимізації дозволяє істотно підвищити ефективність маршрутів дронів при збільшенні розмірів задачі.
Рисунок 1 Порівняння нормалізованого часу польоту для різних методів маршрутної оптимізації дрона залежно від кількості клієнтів (за даними [5]). Алгоритми, що враховують додаткові фактори (вантаж та вітер), демонструють кращу часову ефективність, особливо на
На рис. 1 видно, що для малої кількості точок різниця між методами незначна – всі алгоритми забезпечують близький до оптимального час (близько 0.9–1.0 у нормалізованому вираженні). Проте із зростанням числа клієнтів (понад 15) алгоритми DPTSP та спрощені DPFS починають відставати (їх стовпчики ближчі до 1.0 і навіть перевищують цю позначку для 20 точок), тоді як удосконалений метод BFFS-LW утримує час на рівні ~0.95 від базового. Це означає, що в складних умовах врахування факторів ваги вантажу та вітру дає виграш близько 5% у часі польоту порівняно з традиційними підходами. Хоча це покращення може здатися невеликим, у масштабах великої логістичної мережі чи при критичних доставках (медикаменти, кров тощо) навіть 5–10% скорочення часу є вагомим. Таким чином, сучасні методи оптимізації маршрутів дронів, особливо метаевристичні та гібридні, дозволяють не лише обробляти великі сценарії, але й враховувати реальні умови експлуатації, що суттєво підвищує ефективність та надійність безпілотних доставок.
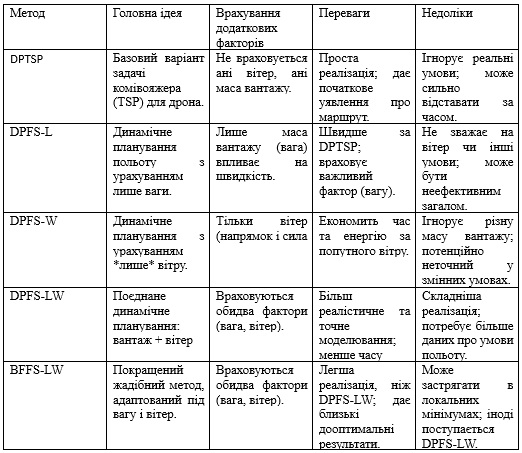
Таблиця 2 Характеристики й пояснення до методів, зображених на Рис. 1
У Таблиці 2 наводяться умовні назви методів (DPTSP, DPFS-L, DPFS-W, DPFS-LW, BFFS-LW), запозичені з оригінальної публікації. Як свідчить Рис. 1, порівняно з базовим DPTSP, використання інформації про масу вантажу і вітрові потоки дає змогу знизити час польоту на 5–10% для невеликих наборів точок і на 10–15% для середніх і великих обсягів (15–20 адрес). Різні модифікації жадібних алгоритмів (на зразок BFFS-LW) здатні досягати результатів, співставних з більш формальними (динамічними) підходами, проте можуть втрачати оптимальність у складніших умовах (динамічний попит, змінний вітер).
Математична модель оптимального маршруту дрона.
Розглянемо задачу, де один дрон зобов’язаний відвідати n точок доставки (клієнтів) і повернутися до бази, позначеної 0. Для зручності запишемо розширену множину:
де 0 – це база (депо), а 1…n – адреси доставки. Кожній парі (i,j) із V×V зіставлена відстань (або час) польоту dij, що може бути обчислена на основі координат точок або реального ландшафту. Нехай бінарні змінні xij ∈ { 0, 1} відповідають рішенню про перехід:
Якщо xij = 1, дрон летить безпосередньо з точки i до точки j. Метою є мінімізувати сумарну довжину (або тривалість) маршруту:
Щоб кожна точка k∈{1,…,n} була відвідана рівно один раз, накладають обмеження:
Це гарантує, що дрон заходить у кожну точку рівно один раз і виходить з неї теж один раз. Додатково потрібно зафіксувати виїзд і повернення дрона у базу (0):
Важливо уникнути субтурів (внутрішніх циклів без участі бази). Для цього використовують допоміжні змінні порядку відвідин uiu_iui і класичні нерівності Міллера–Такера–Земліна:
Ці обмеження змушують маршрут дрона формувати єдиний цикл через усі точки. Нарешті, дрон має обмежений ресурс батареї або дальність Dmax, тож сума дистанцій у маршруті не може перевищувати цього радіуса:
Узагальнюючи, модель оптимального маршруту дрона в дискретному вигляді можна сформулювати як (1), (2), (3), (4),(5) при x(ij )∈ {0,1}, 0 ≤u_i≤n.
Зазначена модель належить до класу NP-складних задач і розв’язується точно лише для невеликих n. Проте її можна розширювати під конкретні потреби (наприклад, кілька дронів, координація з вантажівками чи проміжні пункти підзарядки). Метаевристичні алгоритми (генетичні, мурашині, рій частинок) дозволяють знаходити наближені до оптимуму розв’язки для більших масштабів за прийнятний час.
Реальні приклади впровадження дронів у логістичних ланцюгах.
У багатьох країнах уже реалізовано пілотні або повномасштабні проекти застосування дронів для доставки. Нижче наведено список найбільш відомих прикладів:
- Amazon Prime Air – комерційний пілотний проект (США, починаючи з 2022 року). Дрони Amazon автономно доставляють невеликі посилки, долаючи до ~15 км за 15–30 хвилин, мінімізуючи участь людини і транспортні затори.[9]
- Zipline – медичні дрони в Руанді та Гані для оперативної доставки крові та ліків у віддалені регіони. Крилаті дрони Zipline здатні літати до ~80–100 км, скидаючи вантаж з парашутом і повертаючись на базу без зупинки.[10]
- Wing (Alphabet/Google) – система міської доставки дронами (Австралія, США). Дрони вилітають із бази-«вулика» і опускають замовлення на лебідці, не приземляючись. За кілька років Wing виконала десятки тисяч успішних доставок з мінімальним часом і вартістю.[11]
- DHL Parcelcopter (Німеччина) – перші експерименти з доставкою дронами у гірські райони (близько 2015–2017 рр.). Мета – скоротити час перевезення поштових пакунків у важкодоступні сільські місцевості.[12]
- «Нова Пошта» (Україна) – тестові польоти між Києвом і Львовом (дистанція ~500 км). Демонструє можливість міжміської доставки малих посилок дронами за 6–7 годин, що порівнянно з автоперевезенням, але зі зниженим впливом на дороги та викиди CO₂.
Усі ці приклади підтверджують життєздатність і доцільність використання безпілотних літальних апаратів у логістиці, особливо на «останній милі» доставки. При цьому оптимізація маршрутів, зазвичай, інтегрована в програмне забезпечення керування флотом дронів: алгоритми динамічно визначають послідовність відвідувань, зважаючи на нові замовлення, погоду, регуляторні обмеження тощо. Практичне впровадження таких систем доводить, що дрони істотно скорочують час і витрати доставки, а також можуть працювати в умовах, де традиційний транспорт недоступний або занадто повільний.
Висновки та перспективи подальших досліджень.
Оптимізація маршрутів дронів у логістиці є багатогранною задачею, що поєднує в собі класичні проблеми маршрутизації транспортних засобів та унікальні особливості безпілотних літальних апаратів. Проведений аналіз показав, що останніми роками досягнуто значного прогресу: розроблено ефективні алгоритми, які дозволяють будувати маршрути для десятків і сотень дронів одночасно[8], враховуючи при цьому енергетичні обмеження та навіть динамічні фактори (вітер, змінний попит клієнтів тощо). Точні методи забезпечують еталонну якість рішень на малих задачах, евристики й метаевристики – масштабовність на великих. Запропонована математична модель маршруту дрона може слугувати базисом для подальших модифікацій, зокрема для задач з кількома дронами, з підзарядками або комбінованих (дрон + наземний транспорт). Практичні впровадження (Amazon, Zipline, Wing) підтвердили дієвість оптимізованих маршрутів: дрони скорочують час і витрати доставки, особливо в сегменті «останньої милі» та у важкодоступних локаціях. Водночас залишаються виклики, які окреслюють перспективи подальших досліджень. Серед них – вдосконалення батарейних технологій для збільшення дальності польоту та вантажопідйомності дронів; розробка єдиних стандартів і систем керування повітряним рухом дронів у містах; створення алгоритмів, що динамічно перебудовують маршрути при зміні погодних умов чи появі нових замовлень у режимі реального часу; інтеграція дронів у мультимодальні логістичні мережі (спільно з вантажівками, роботами, кур’єрами) на основі єдиних оптимізаційних моделей. Важливим є також підвищення суспільної довіри та прийняття дронів – і тут оптимальні маршрути сприяють безпеці (уникають людних місць, мінімізують ризики). Отже, оптимізація маршрутів безпілотників залишається динамічним напрямом наукових досліджень, який має вирішальне значення для майбутньої сталої, швидкої та ефективної логістики.
Список використаних джерел:
1. Кучеренко О.І., Вакалюк Т.А. Огляд досліджень щодо системи побудови маршрутів дронів // Вчені записки ТНУ ім. В.І. Вернадського. Серія: Технічні науки. – 2024. – Т. 35 (74), №1. – С. 178–184. DOI: 10.32782/2663-5941/2024.1.1/27. Доступ онлайн: https://www.tech.vernadskyjournals.in.ua/journals/2024/1_2024/part_1/29.pdf
2. Лещенко Ю., Мороз І., Юхимчук М. Використання UAV (дронів) для оптимізації доставки останньої милі // Вимірювальна та обчислювальна техніка в технологічних процесах. – 2024. – №4(80). – С. 53–60. DOI: 10.31891/2219-9365-2024-80-53. Доступ онлайн: https://vottp.khmnu.edu.ua/index.php/vottp/article/view/446
3. Hooshyar, M., Huang, Y. Meta-heuristic Algorithms in UAV Path Planning Optimization: A Systematic Review (2018–2022) // Drones. – 2023. – Vol. 7(12): 687. DOI: 10.3390/drones7120687. Open Access. Доступ онлайн: https://www.mdpi.com/2504-446X/7/12/687.
4. Tang, G.; Xiao, T.; Du, P.; Zhang, P.; Liu, K.; Tan, L. Improved PSO-Based Two-Phase Logistics UAV Path Planning under Dynamic Demand and Wind Conditions // Drones. – 2024. – Vol. 8(8): 356. DOI: 10.3390/drones8080356. Open Access. Доступ онлайн: https://www.mdpi.com/2504-446X/8/8/356.
5. Ito, S.; Akaiwa, K.; Funabashi, Y. et al. Load and Wind Aware Routing of Delivery Drones // Drones. – 2022. – Vol. 6(2): 50. DOI: 10.3390/drones6020050. Open Access. Доступ онлайн: https://www.mdpi.com/2504-446X/6/2/50.
6. Tong, B.; Wang, J.; Wang, X.; Zhou, F.; Mao, X.; Zheng, W. Optimal Route Planning for Truck–Drone Delivery Using Variable Neighborhood Tabu Search Algorithm // Applied Sciences. – 2022. – Vol. 12(1): 529. DOI: 10.3390/app12010529. Open Access. Доступ онлайн: https://www.mdpi.com/2076-3417/12/1/529.
7. Altin, I.; Sipahioglu, A. Drone Arc Routing Problems and Metaheuristic Solution Approach // Drones. – 2024. – Vol. 8(8): 373. DOI: 10.3390/drones8080373. Open Access. Доступ онлайн: https://www.mdpi.com/2504-446X/8/8/373.
8. Choudhury, S.; Solovey, K.; Kochenderfer, M.J.; Pavone, M. Efficient Large-Scale Multi-Drone Delivery Using Transit Networks // Journal of Artificial Intelligence Research. – 2021. – Vol. 70. – P. 757–788. DOI: 10.1613/jair.1.12450. Open Access. Доступ онлайн: https://arxiv.org/pdf/1909.11840.
9. Amazon Prime Air – Drone Delivery Service (офіційна інформація). – Amazon.com, 2022-2023. Доступ: https://www.aboutamazon.com/prime-air (дата звернення: 04.03.2025).
10. Zipline Drone Delivery – Company Website. – Zipline International Inc. (Опис проектів у Руанді та Гані). Доступ: https://www.flyzipline.com (дата звернення: 04.03.2025).
11. Wing Drone Delivery – About Wing. – Wing (Alphabet Inc.), 2023. Доступ: https://wing.com/
12. DHL successfully concludes trial of third DHL Parcelcopter generation – DHL, URL: https://inmotion.dhl/en/dr1/article/successful-trial-integration-of-dhl-parcelcopter-into-logistics-chain
13.«Нова пошта» доставила посилку дроном із Києва до Львова - The Village Україна, URL: https://www.village.com.ua/village/business/news/318883-nova-poshta-dostavila-posilku-dronom-z-kieva-do-lvova
14. Васкес С.А., Ангуло Г., Клапп М.А. An Exact Solution Method for the TSP with Drone Based on Decomposition // Optimization Online Preprint. – 2020. – 19 с. Open Access. Доступ: https://optimization-online.org/wp-content/uploads/2020/04/7721.pdf.
|