Introduction
The expansion of unmanned aerial vehicle (UAV) applications necessitates the development of new technologies for their detection and coordinate assessment. The small size, high maneuverability, and capability for low-altitude flight of UAVs require specialized systems for long-range detection under various weather conditions. Current UAV detection systems rely on radar [1-3], electro-optical [4-6], and acoustic technologies [7-9]. Each of these systems has its own advantages and disadvantages. Acoustic systems, which utilize the inherent acoustic emissions of aerial objects for detection, coordinate assessment, and recognition, are noted for their simplicity and cost-effectiveness. This study examines the features of conducting simulation modeling using parametric, non-parametric, and semi-parametric methods of acoustic direction finding.
Simulation methodology and results
This section presents the acoustic modeling of an acoustic locator. The device consists of two antenna arrays positioned at a 90-degree angle, with each array containing four microphones spaced 0.5 meters and 1 meter apart, respectively. To determine the azimuthal bearing, the sound delay between pairs of microphones was calculated using cross-correlation signal processing. The modeling was based on recordings of acoustic signals from aerial objects captured by a single microphone at a sampling frequency of 44,100 Hz. An artificial delay was introduced in one of the channels relative to the first channel to simulate the required bearing of the object. Four scenarios were developed for the simulation modeling:
1. The signals from the first and second channels exhibit no time difference. This occurs when the object is positioned perpendicular to the center of the microphone array, specifically when the bearing to the object is 0 degrees.
2. The signal from the second channel is delayed by 66 clock cycles relative to the first channel, with a maximum time difference of approximately 130 clock cycles between microphones positioned 1 meter apart. For a distance of 0.5 meters, the delay will be 65 clock cycles. This delay is observed for microphones with a large baseline when the angle to the target is around 30 degrees, while for microphones with a small baseline, the angle is approximately 90 degrees.
3. The signal from the second channel experiences a delay of 22 clock cycles compared to the first channel. This delay is observed for microphones with a 1-meter baseline when the bearing to the object is approximately 10 degrees. For microphones with a 0.5-meter separation, the delay is roughly doubled, reaching about 20 degrees.
4. The signal from the second channel is delayed by 11 clock cycles compared to the first channel. This delay is observed for microphones with a baseline of 1 meter when the angle to the object is approximately 5 degrees, while for microphones with a separation of 0.5 meters, the delay is roughly doubled, reaching about 10 degrees.
During the modeling process, both parametric and non-parametric methods of triangulation were examined.
The parametric method for tracking aerial objects. Calculations of the cross-correlation function of signals from two channels were conducted, enabling the determination of the delay at which this function reaches its peak values. The identified delay was then utilized for the subsequent calculation of the bearing to the target.
where S1 (i) and S2 (i+k) denote the signals from the first and second microphones, respectively, i represents the current sample, k indicates the time shift of the second channel relative to the first, N0 is the number of samples in the segment (segment length) used for calculating the cross-correlation function, l is the segment number, and Rmax (k) is the maximum value of the cross-correlation function achieved at a shift of k samples.
During the simulation modeling process, signal recordings from various objects were utilized, including the Shahed-136 UAV (Geran-2) and helicopters such as the Ka-52, Mi-8, and Mi-24, which are frequently deployed in Ukraine.
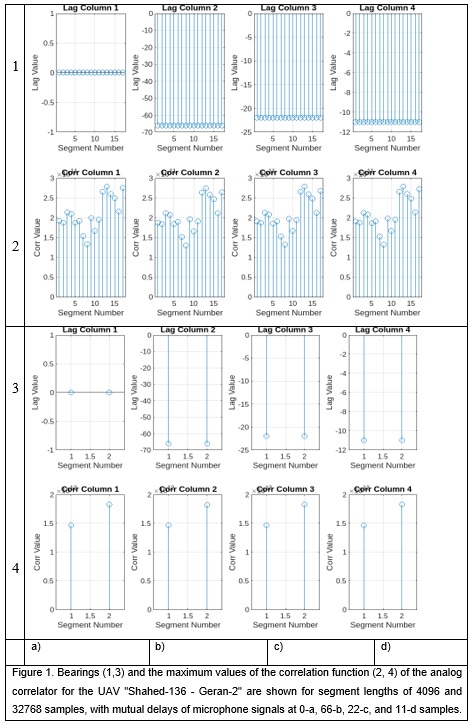
The segment lengths used in the modeling were 4096, 16384, and 32768 samples, corresponding to 92.9 ms, 0.372 s, and 0.743 s, respectively. The frequency resolution achieved was 10.77 Hz, 2.688 Hz, and 1.35 Hz. Increasing the segment length enhances the signal-to-noise ratio, which improves resolution but negatively impacts the response time for detecting the useful signal within the noise. Alongside determining the time shifts of the signals, the maximum values of the correlation function are recorded across the channels. Figure 1 illustrates the time shift values and the maximum correlation function values for individual segments at varying lengths.
It is evident that when comparing relatively small segment sizes (4096) to significantly larger ones (32768), the assessment of signal delay times for UAVs yields accurate results (0; 66; 22; 11).
The maximum values of the correlation functions increase from 2×1011 to approximately 1.6×1012. Similar results were observed for other types of objects, indicating the effectiveness of the parametric method in determining the bearings of aerial objects, including small-sized ones. This occurs when utilizing various segment lengths. An increase in segment length leads to a reduction in the fluctuations of the maximum value of the cross-correlation function and enhances its magnitude, which positively impacts the reduction of errors in bearing determination and improves the conditions for detecting acoustic signals.
Non-parametric methods of acoustic direction finding. In the presence of non-Gaussian noise, the application of non-parametric detection methods offers distinct advantages over linear parametric approaches. We will examine the effectiveness of non-parametric methods for direction finding. To achieve this, we will convert the input signals into binary quantized formats, either for both microphones or just for one. When the conversion is applied to both channels, and the resulting signals are processed using relation (1), we obtain a sign correlator. Conversely, if the binary conversion is performed for only one channel, we are dealing with a sign-analog correlator. The relations utilized in both scenarios are presented in (2 a, b) respectively.
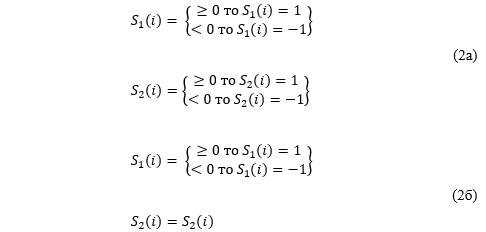
In the first instance, we are dealing with a sign correlation method, while in the second instance, we are working with a sign-analog correlation method. The first approach is non-parametric, whereas the second is semi-parametric, being non-parametric for one channel and parametric for the other.
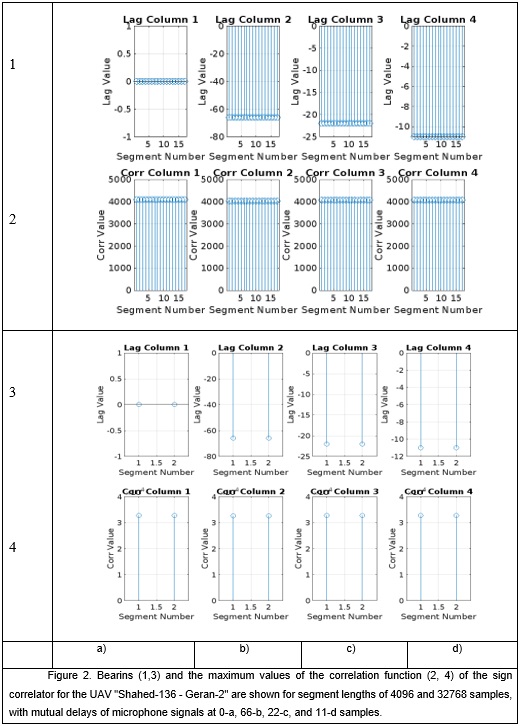
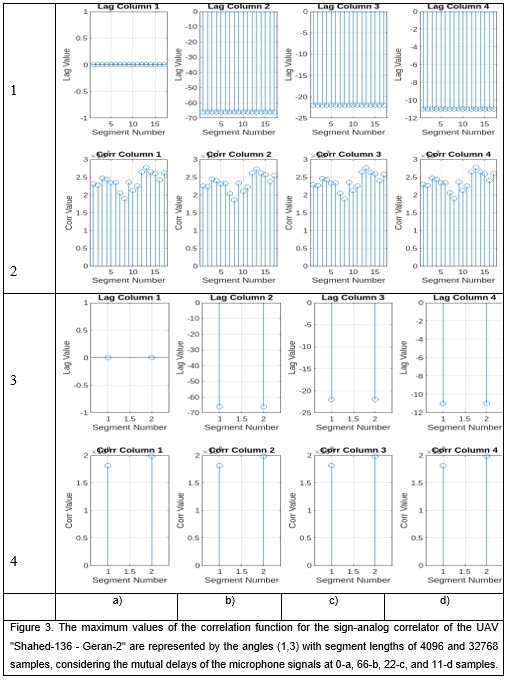
The simulation results for the same objectives and under similar conditions are illustrated in Figure 2 for the sign correlator and in Figure 3 for the sign-analog algorithms used in the formation of the correlation function.
Observations indicate that for modeled non-parametric direction finders, precise determination of UAV bearings is achieved when segment sizes range from 4096 to 32768 samples. However, in contrast to the parametric analog correlator, the maximum values for both sign and sign-analog correlators are significantly lower (ranging from 4×103 to 3×104 for the sign correlator and from 2.5×107 to 2×108 for the sign-analog correlator, depending on the segment size). This suggests the feasibility of using fewer bits to represent numbers when calculating the cross-correlation function. Additionally, the computation process does not involve multiplication, which is more time-consuming compared to addition. This simplification accelerates computational processes, a crucial factor for implementing algorithms in real-time applications.
It is important to note that for all selected types of aircraft, including the UAV "Shahed-136 - Geran-2" and various helicopter models such as Mi-8, Mi-24, and Ka-52, stable and accurate bearing estimates were observed across all tested tracking methods.
In the modeling of direction-finding algorithms, only useful signals were utilized under conditions free from interference. In real-world scenarios, these useful signals may be obscured by noise, such as that caused by wind, which exhibits a non-stationary and non-Gaussian nature. Therefore, it is advisable to investigate the errors in direction finding (both systematic and root mean square) in relation to the level of environmental noise, which will also display non-stationary and non-Gaussian characteristics across various direction-finding methods.
Conclusions
1. The expansion of UAV usage necessitates advancements in detection technologies, particularly in environments with non-stationary acoustic noise. The article emphasizes that acoustic detection methods are promising due to their simplicity and cost-effectiveness.
2. The paper describes simulation modeling techniques for acoustic direction finders, incorporating both parametric and non-parametric approaches. The modeling utilizes actual recordings of acoustic signals from UAVs and helicopters, highlighting the practical significance of the research conducted.
3. It has been found that parametric methods, especially the cross-correlation technique, enable accurate determination of signal delays from various types of aircraft. Increasing the length of segments enhances the signal-to-noise ratio and reduces errors in bearing estimation.
4. Non-parametric detection methods exhibit advantages in complex noise conditions, particularly due to reduced computational requirements and ease of implementation. However, their peak values of correlation functions tend to be lower compared to parametric methods.
5. Further investigation into the impact of non-stationary noise on the accuracy of direction finding is recommended, along with the development of algorithms capable of functioning in real-world conditions where useful signals may be obscured by noise. This approach will help reduce errors in bearing estimates.
6. The results obtained indicate the effectiveness of acoustic methods for detecting unmanned aerial vehicles (UAVs), which is a crucial aspect for enhancing security in contemporary settings. Research in this field is becoming increasingly significant as technologies continue to evolve alongside the growing threats posed by drones.
References:
1. Oleinikov, V., Zubkov, O., Kartashov, V., Koritsev, I., Sheiko, S., Babkin, S. Experimental assessment of the effectiveness of algorithms for determining the direction of unmanned aerial vehicles by their acoustic emissions//Materials of the International Scientific and Practical Conference "Problems of Information Communications: Science and Technology." – 2019.
2. Makarenko, S.I., Tymoshenko, A.V., Vasilchenko, A.S. Analysis of means and methods of counteracting unmanned aerial vehicles. PART 1. Unmanned aerial vehicle as an object of detection and destruction//Control, communication and security systems. – 2020. – № 1.
3. Kartashov, V.M. and others. Signal processing in electronic remote atmospheric monitoring systems. - Kharkiv: KNURE, 2014.
4. Kartashov, V., Oleinikov, O., Zubkov, S., Sheiko, S. Optical detection of unmanned aerial vehicles on a video stream in real time//Materials of the Fourth International Conference on Information and Telecommunication Technologies and Radio Electronics (UkrMiCo "2019). - Odessa, Ukraine, 2019.
5. Kartashov, V.M., Oleinikov, V.N., Kolendovskaya, M.M., Tymoshenko, L.P., Kapusta, A.I., Rybnikov, N.V. Complex images in the detection of unmanned aerial vehicles//Radio engineering. – 2020. - Vol. 201.
6. Sergienko, O., Rodriguez-Quiñones, H. S. Development and application of optoelectronics in machine vision: a monograph. – Hershey, PA : IGI Global, 2016.
7. Oleinikov, V.N. et al. Research on the effectiveness of detecting and recognizing small unmanned aerial vehicles by their acoustic radiation//Telecommunications and radio engineering. – 2019. - T. 78, NO. 9. - P. 759-770. URL: https://doi.org/10.1615/telecomradeng.v78.i9.20 (contact date: 20.08.2024).
8. Kartashov, V. et al. Using an acoustic signal to detect, recognize and determine the direction of motion of small unmanned aerial vehicles//Materials of the 15th IEEE International Conference on Advanced Trends in Radio Electronics, Telecommunications and Computer Engineering (TCSET 2020). - Lviv-Slavske, Ukraine, 25-29 February 2020 URL: https://doi.org/10.1109/tcset49122.2020.235458 (contact date: 20.08.2024)
9. Kartashov, V.M. and others. Information characteristics of sound radiation of small unmanned aerial vehicles//Telecommunications and radio engineering. – 2018. - T. 77, NO. 10. - P. 915-924. URL: https://doi.org/10.1615/telecomradeng.v77.i10.70 (contact date: 20.08.2024).
|