Інтенсивний розвиток безпілотних літальних апаратів (БпЛА) пояснюється цілою низкою їх переваг: багатоцільовим призначенням; дешевизною проектування, виготовлення та експлуатації; можливістю прихованого застосування, здатністю виконувати завдання в умовах, небезпечних для життя людини та збереження літального апарату (ЛА).
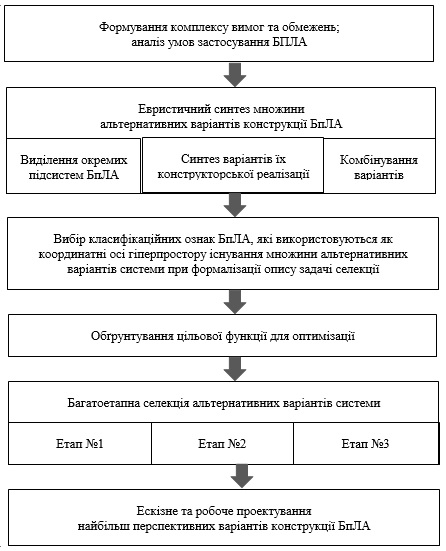
Як і проектування звичайного ЛА, розробка БпЛА складається з кількох етапів, першим із яких є зовнішнє (концептуальне) проектування, у ході якого формується основна концепція БпЛА [1]. Реалізація обраних на цьому етапі рішень дозволяє на наступних етапах проектування забезпечити здатність виконувати як основні, так і допоміжні цільові призначення, а також ефективність БпЛА, що розробляється [2]. Правильний вибір напрямів творчого пошуку на етапі зовнішнього проектування є вирішальною умовою для здійснення всієї програми розробки БПЛА. Методи вирішення проблем концептуального проектування належать до класу евристичних, тому вони важко піддаються формалізації та автоматизації [3]. Укрупнений алгоритм розв'язання задачі запропонованим методом наведено на рисунку 1.
Рисунок 1. Укрупнений алгоритм методу зовнішнього проектування БпЛА
На першому етапі необхідно сформувати науково-обґрунтований комплекс вимог до створюваного БпЛА. Далі формуються набори альтернативних варіантів рішення для кожної з виділених підсистем БпЛА, набори всіх можливих конструктивних рішень та вводяться вагові коефіцієнти, що характеризують перспективність, бажаність застосування саме такого рішення в конструкції БпЛА. Критерієм оцінки сформованого варіанта є комплект коефіцієнтів, що формується за заданим алгоритмом для кожної підсистеми. Метод має ряд принципових переваг:
• найбільш оригінальні та перспективні варіанти рішень не втрачаються за психологічним бар'єром розробника нової конструкції;
• розробнику надається можливість здійснювати аналіз різноманітних варіантів конструкції виробу, що проектується;
• метод органічно включає кращі прийоми брейнстормінгу, наочний і легко автоматизується.
Таким чином, запропонований метод та його програмна реалізація САКОПР є потужним автоматизованим інструментом для генерації, подальшого аналізу та селекції множини альтернативних варіантів БпЛА, що проектується.
Список використаних джерел:
1. Концепции развития современной авиационной техники основных назначений : инновац. учеб. для неавиационных специальностей аэрокосм. ун-та / В. А. Богуслаев, А. И. Рыженко, Е. А. Мураховская, Р. Ю. Цуканов. — Запорожье : Просвіта, 2020. – 707 с.
2. Мураховська О. А. Аналіз невизначеностей при концептуальному проектуванні безпілотної авіаційної техніки у єдиному інформаційному просторі [Текст]/ О. А. Мураховська, О. І. Риженко// Всеукраїнська науково-технічна конференція «Інтегровані комп’ютерні технології в машинобудуванні ІКТМ-2017»: Тези доповідей. – Харків: Національний аерокосмічний університет ім. М. Є. Жуковського «Харківський авіаційний інститут», 2017. – Том 1. – с. 256.
3. Мураховська О. А. Технологія пошуку оптимальних концептуальних рішень багатоступінчастих авіаційних систем з різним принципом дії ступенів / О. А. Мураховська // Вісник Харківського університету. Серія: Актуальні проблеми сучасної науки в дослідженнях молодих вчених м. Харкова. – 2001. – № 506. – Ч. 2. – С. 138–140.